Technik
|
Webcam & SoftwarePhilips PCVC690K
(Vesta Pro Scan) USB Webcam unter Linux (debian "woody" 3.0) mit Kernel-Modul pwc v.8.5 Eingesetzte (bzw. ausprobierte) Programme:
|
||
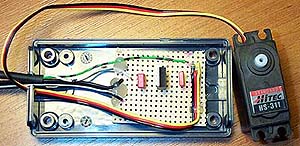
DrehfunktionEinmal auf die verrückte Idee gekommen, die Webcam online drehbar machen zu können, ist mir das nun endlich auch geglückt. Hauptproblem: Zeit :-) Der Aufbau: Bild rechts: C-Control Station, Webcam auf Servo und Spannungsregler (im Gehäuse) |
|
||
|
Im Detail: Um eine stabile Spannungsversorgung des Servos zu gewährleisten habe ich eine kleine Spannungsregler-Schaltung gebaut, die konstante 5 V aus einem angeschlossenen Steckernetzteil liefert. An diese 5 V sind sowohl der Servo als auch an einem Pullup-Widerstand die digitale Signalleitung, die von der C-Control Station kommt angeschlossen. Ausserdem braucht man eine Masseleitung zurück zur C-Control Station, damit die Signalleitung funzt. |
||
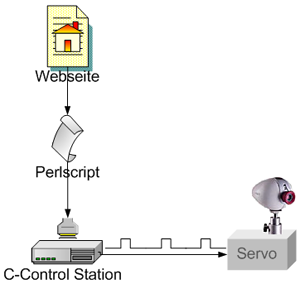
Generell erhält ein Servo seine Information durch Impulse
mit einer Amplitude von +5V, die als absolute Winkelangaben ausgewertet
werden. Tja, und schliesslich der letzte Teil: Wie kann ich den Servo von einer Weboberfläche aus steuern? Dazu habe ich einfach das Basic-Programm auf der C-Control so angepasst, dass es den einzustellenden Winkel von der seriellen Schnittstelle einlesen kann. An meinen Webserver angeschlossen kann ich so mithilfe eines kleinen Perl-Skripts vom Webserver aus einen Winkel an die C-Control übertragen. Dieses Perlskript rufe ich von der Webseite dann einfach mit unterschiedlichen Parametern auf und kann so in verschieden grossen Schritten nach links und rechts navigieren. |
|